2025年人形机器人灵巧手技术与产业应用报告
摘要: 人形机器人正迈向商业化落地的关键阶段,而灵巧手作为其核心末端执行器,正在成为决定机器人操作能力上限的关键部件。最新发布的《2025人形机器人灵巧手技术路径、应用场景与产业链关键环节分析报告》深入剖析了灵巧 ...
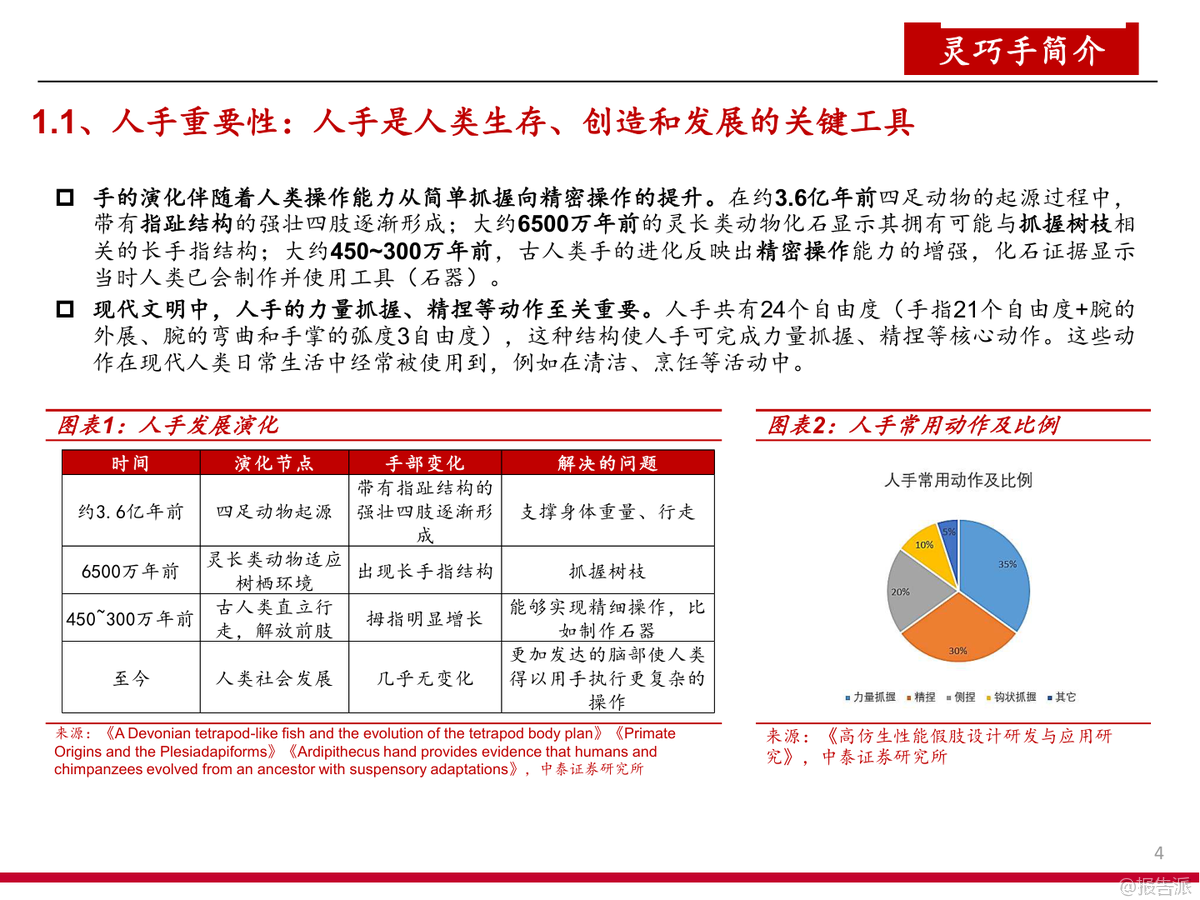
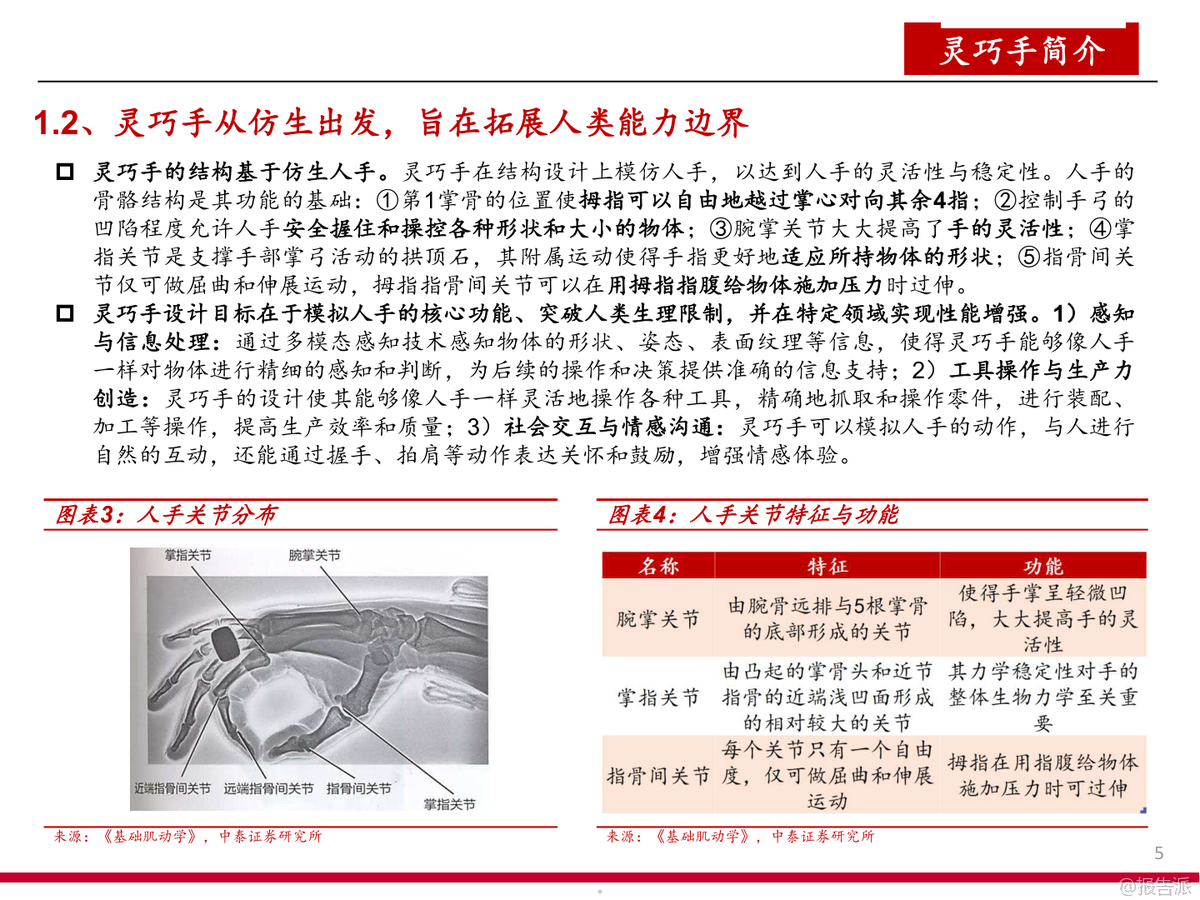
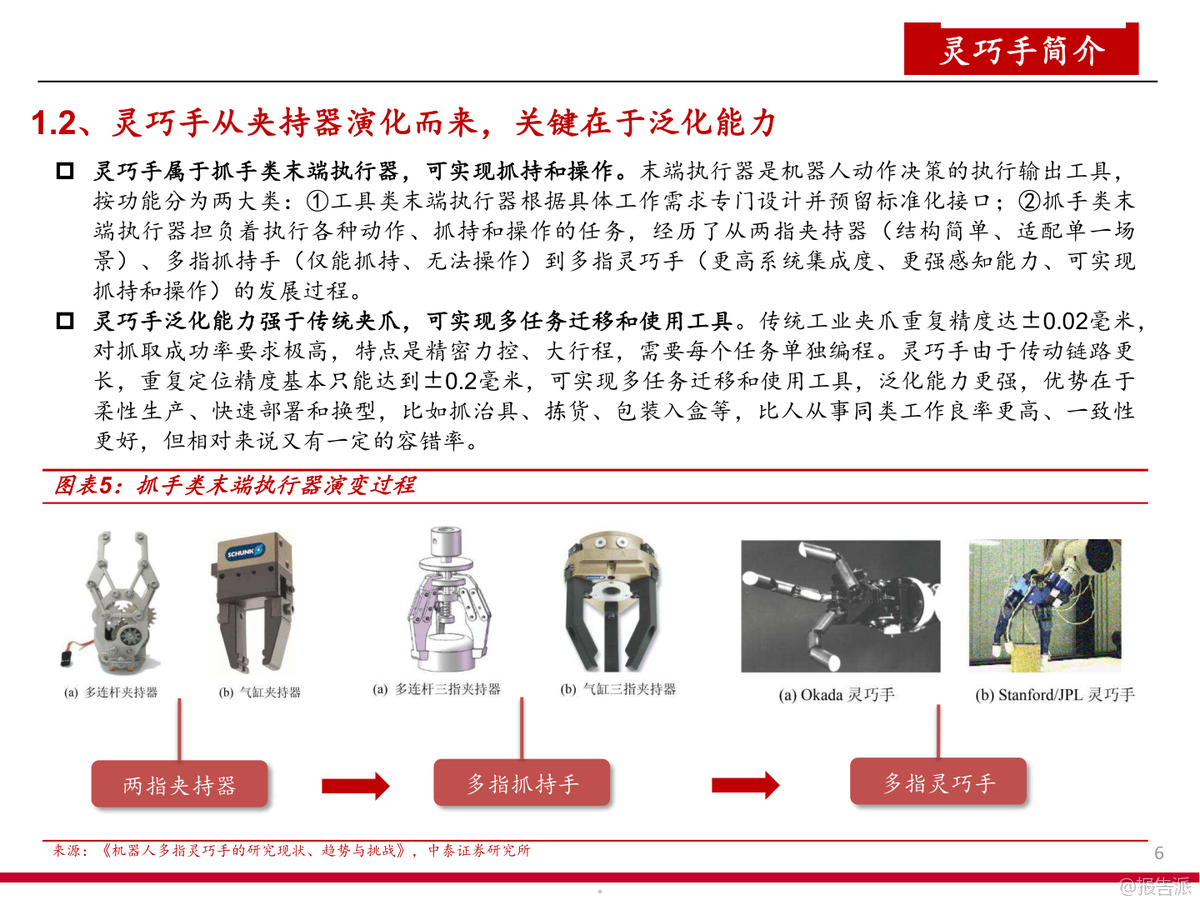
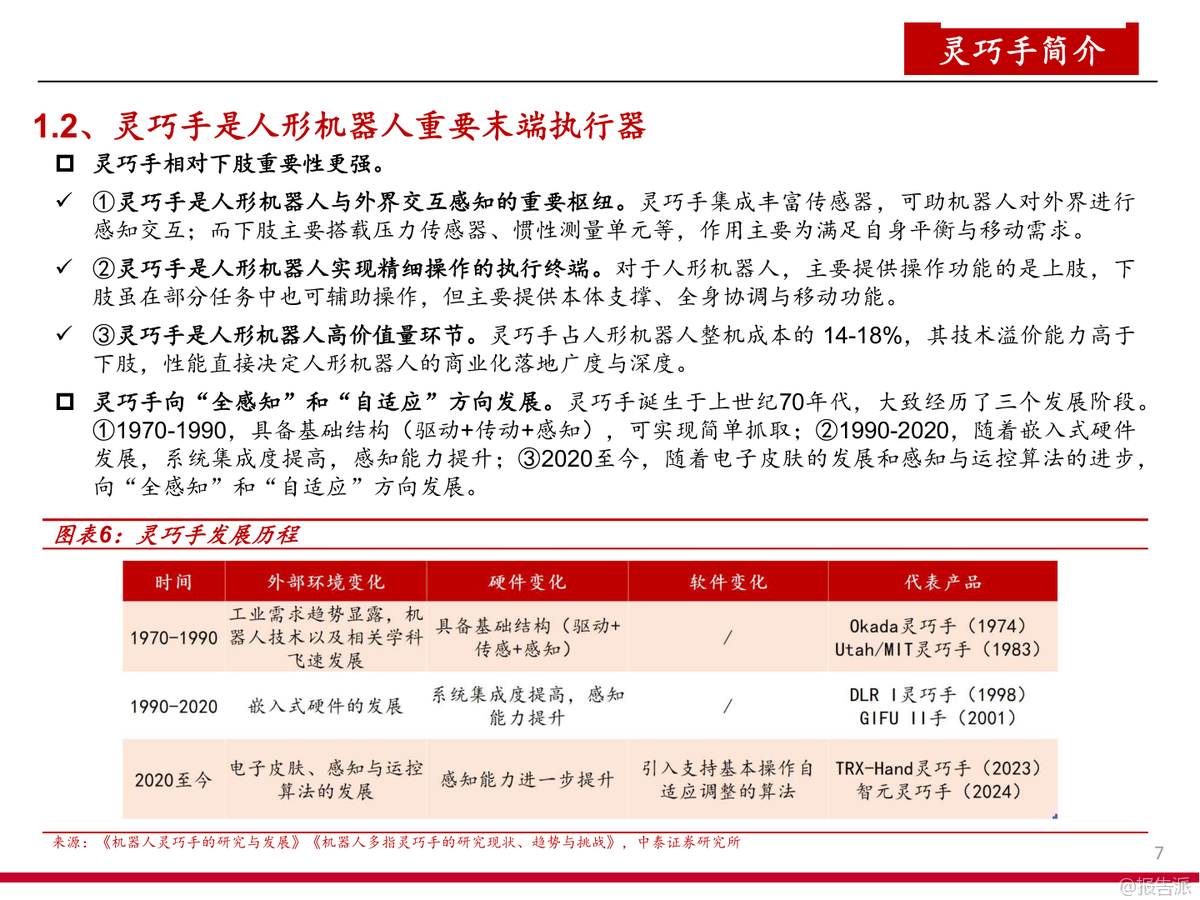
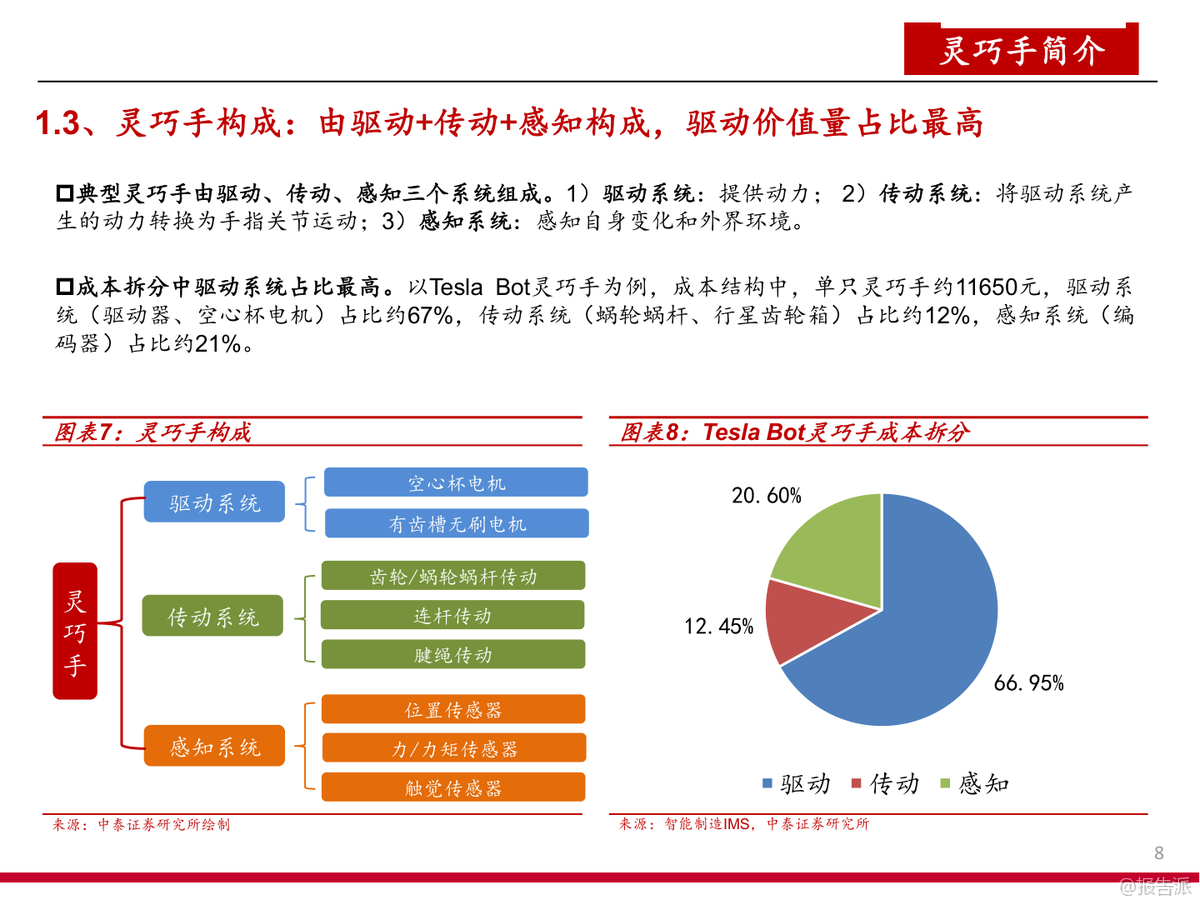
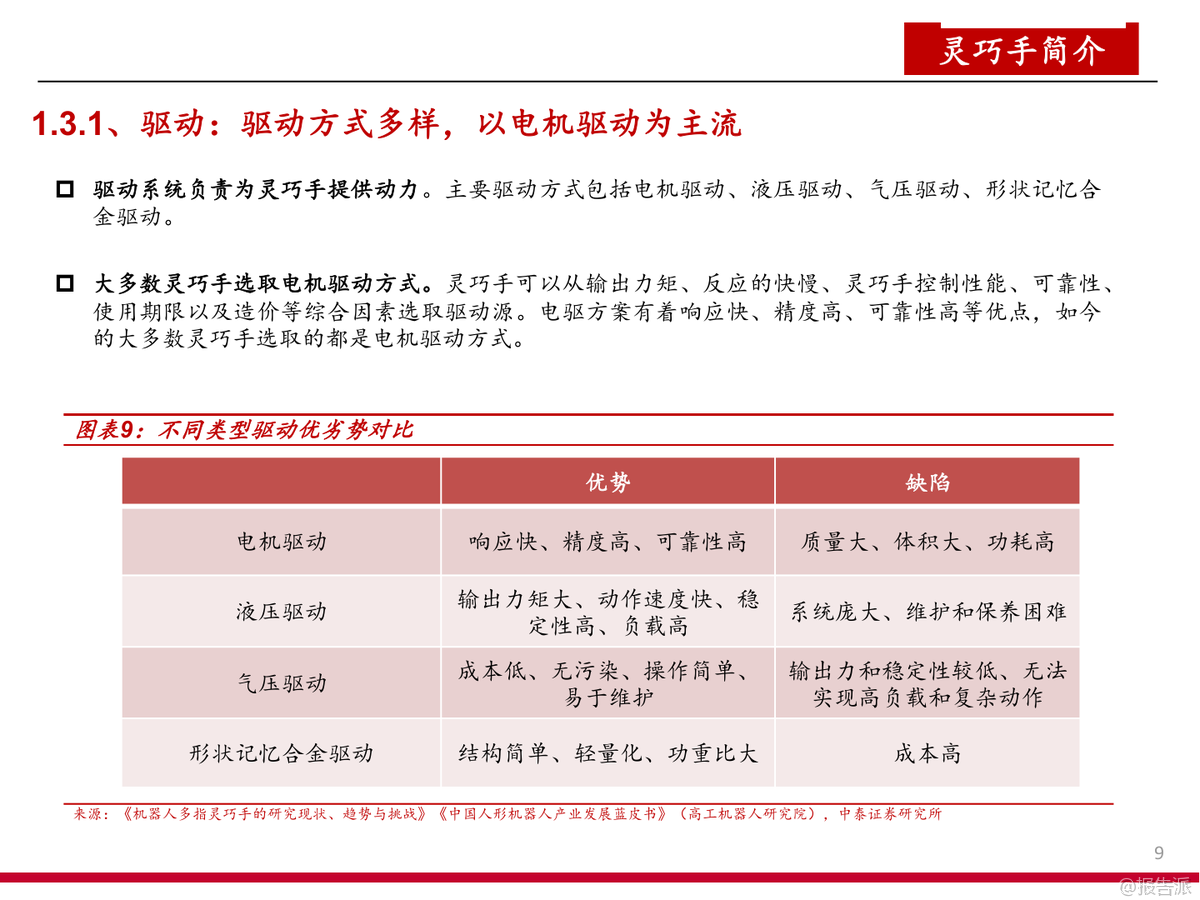
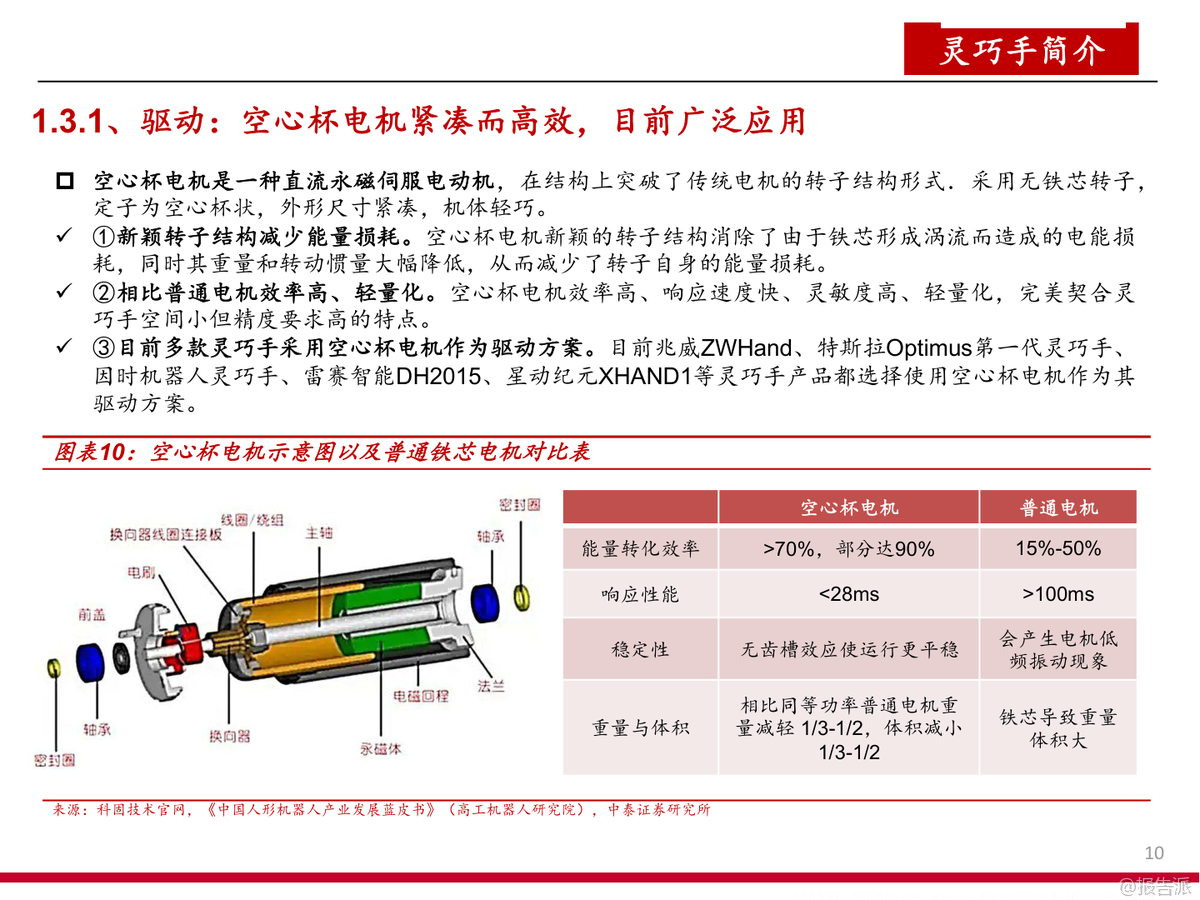
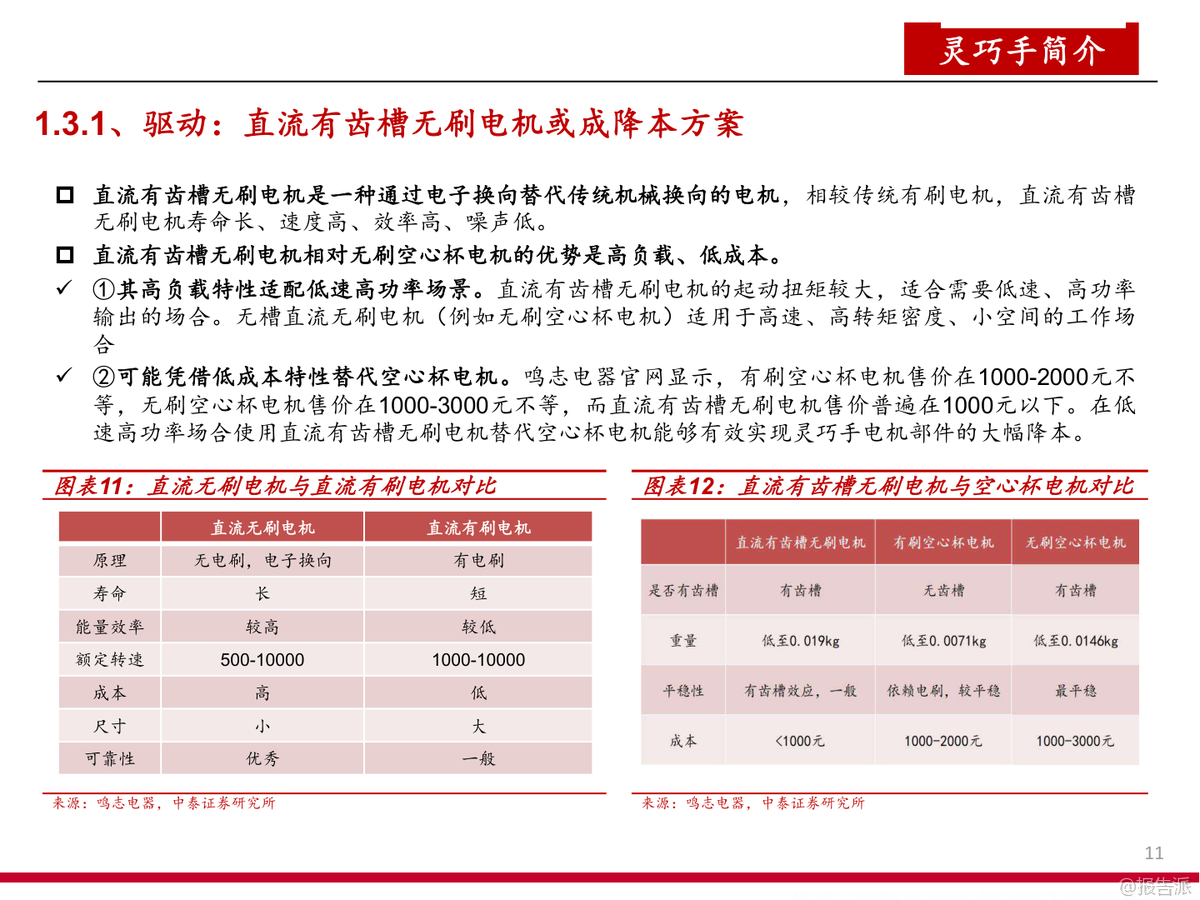
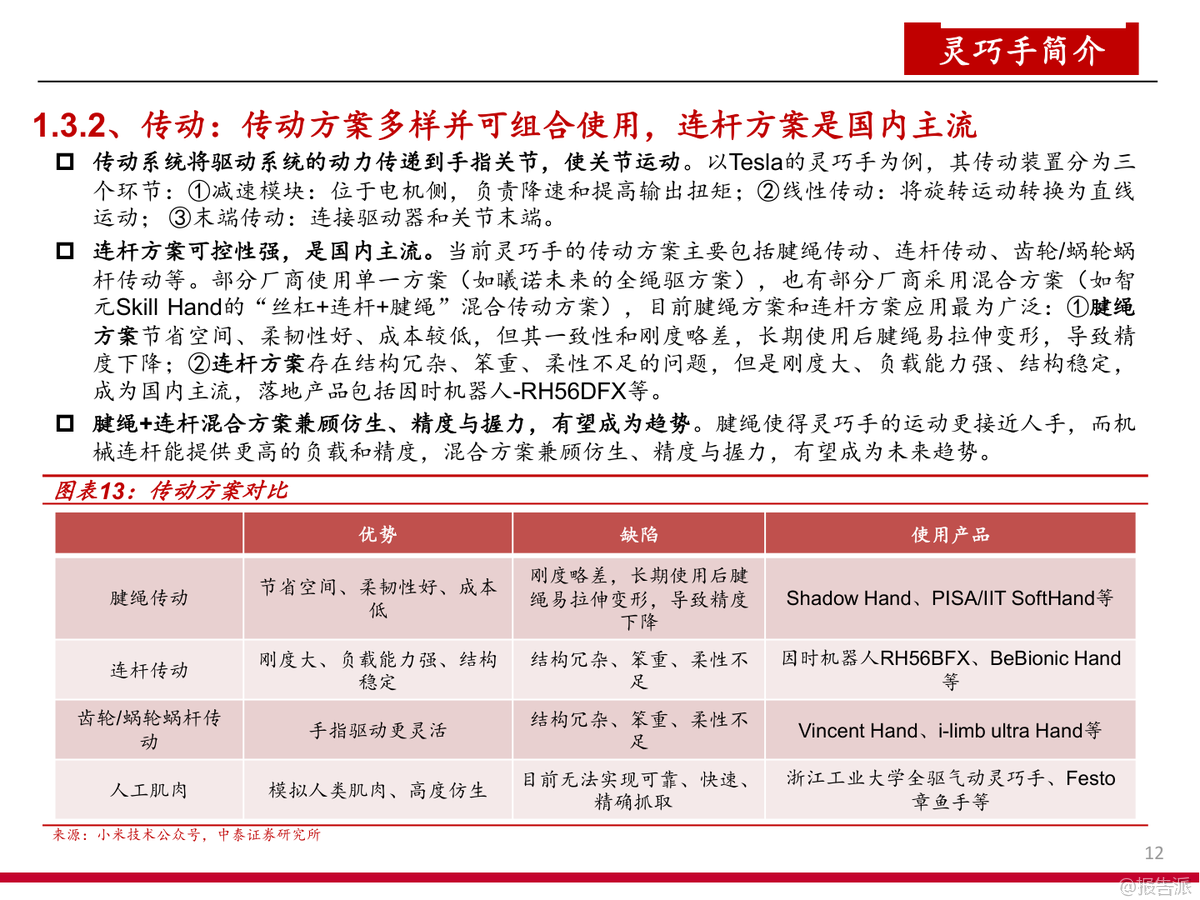
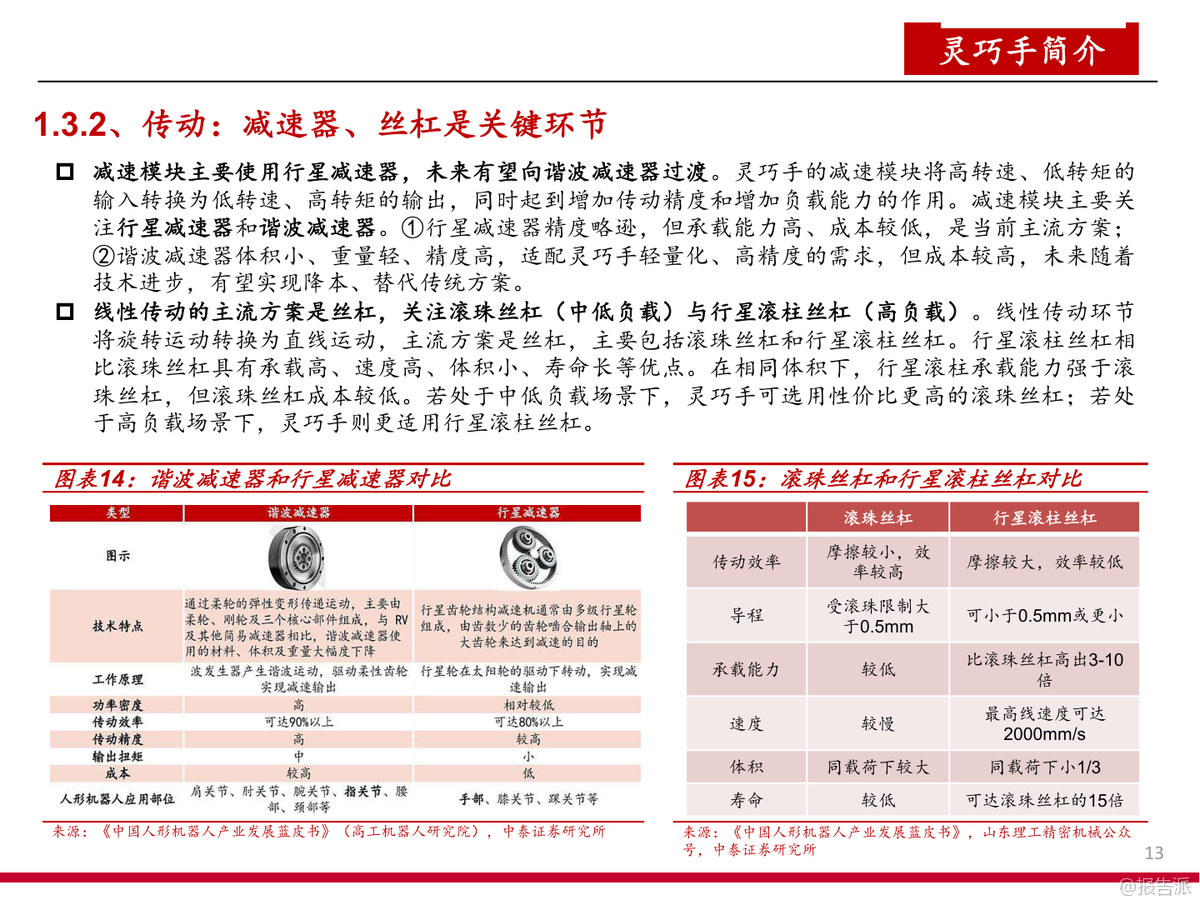
| 人形机器人正迈向商业化落地的关键阶段,而灵巧手作为其核心末端执行器,正在成为决定机器人操作能力上限的关键部件。 最新发布的《2025人形机器人灵巧手技术路径、应用场景与产业链关键环节分析报告》深入剖析了灵巧手的技术演进、设计路线、核心构成及产业化前景,揭示了这一高潜力赛道的发展脉络。 从技术源头看,灵巧手的设计源于对人手的高度仿生。 人类手部拥有24个自由度,具备力量抓握、精捏、侧捏等多种操作模式,是文明创造的重要工具。 现代灵巧手正是以此为蓝本,追求在结构、运动方式和感知能力上的全面模拟。 当前主流技术路线分为“仿人”与“特化”两类:前者如Shadow Hand、兆威ZWHAND等产品,通过多指结构、腱绳传动和柔性电子皮肤实现接近人手的灵活性;后者则打破传统形态,如中科大受章鱼启发的SpiRobs触手型执行器、加州大学的卷尺形GRIP-tape,以高适应性、轻量化应对极端环境,拓展应用边界。 灵巧手的系统构成可归纳为三大核心模块:驱动、传动与感知。 在驱动方面,空心杯电机因其高效率、轻量化和快速响应成为主流选择,但成本较高的问题促使行业探索直流有齿槽无刷电机作为降本替代方案,尤其在工业场景中具备广阔前景。 传动系统则呈现多样化格局,腱绳传动仿生性强但刚度不足,连杆传动结构稳定、负载能力强,已成为国内工业级产品的首选,而“丝杠+连杆+腱绳”的混合方案正成为兼顾精度与柔性的趋势方向。 感知系统是实现“全感知、自适应”目标的核心,涵盖位置、力/力矩和触觉传感器。 其中,六维力/力矩传感器为柔顺控制提供高维反馈,而触觉传感器特别是柔性电子皮肤,正朝着高密度、多功能(压力、温度、硬度)感知发展,被视为机器人理解物理世界的关键。 应用场景上,灵巧手将遵循“特殊场景→工业场景→消费场景”的落地路径。 在应急救援、核电站巡检等高危环境中,机器代人需求迫切,政策支持力度大,灵巧手将率先打开市场空间。 工业领域,3C电子、汽车等柔性制造产线对多任务、快速换型的需求,为灵巧手提供了广阔舞台,其泛化能力远超传统夹爪。 而在消费端,养老陪护、家庭服务等场景对拟人化交互和复杂操作的要求,将推动灵巧手向更高灵活性和智能化演进。 值得注意的是,国产灵巧手正加速追赶,价格已降至国外产品的1/10,部分产品售价进入万元区间,显著降低人形机器人整体成本门槛。 产业链层面,从空心杯电机(鸣志电器)、丝杠(恒立液压)、减速器(中大力德)到六维力传感器(柯力传感)、电子皮肤(汉威科技),国内供应链日趋完善,为大规模商业化奠定基础。 总体来看,灵巧手不仅是人形机器人的“手”,更是其走向通用智能的“神经末梢”,其技术突破与成本下探,将深刻重塑未来机器人产业格局。 出品方:中泰证券 发布时间:2025年
|
上一篇:2025年企业出海商旅管理报告下一篇:2025年OECD混合融资指南
推荐文章
2
2025年云计算行业应用场景报告
资讯
77人已阅读
3
2025年文科生AI编程研究报告
资讯
79人已阅读

4
2025年人工智能与进攻性安全研究报告
资讯
82人已阅读
5
2025年数据库行业技术趋势报告
资讯
78人已阅读
6
2025年生成式人工智能商业价值报告
资讯
75人已阅读
7
2025年体育领域政策汇编报告
资讯
75人已阅读
8
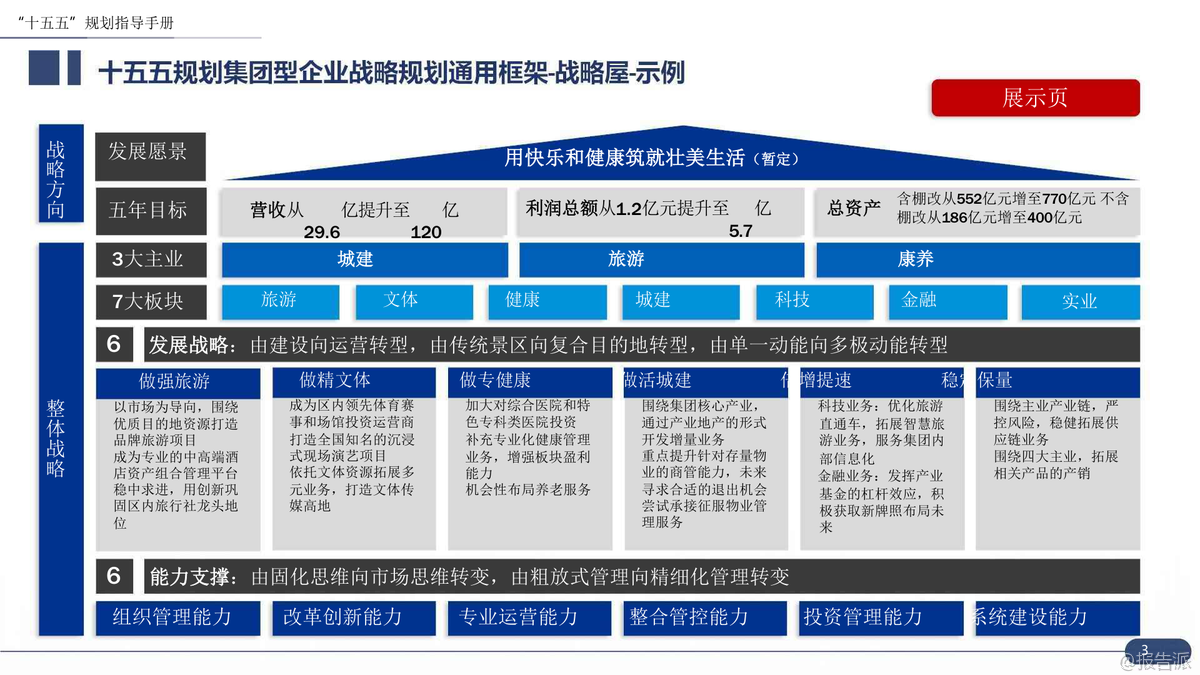
2025年大型央国企“十五五”战略规划编制实
资讯
97人已阅读
9
2025年电子元件供应链研究报告
资讯
93人已阅读
10
2024年Web3及金融科技研究报告
资讯
69人已阅读
数据图表

2
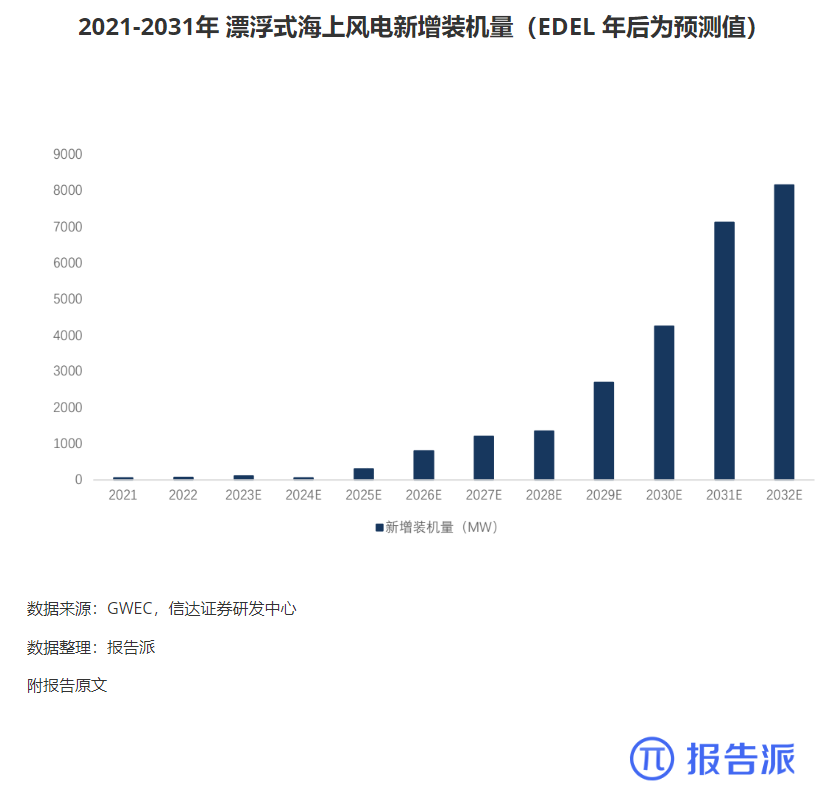
2011-2031 年全球海上风电装机量(含预测)
行业数据
1716人已阅读
3
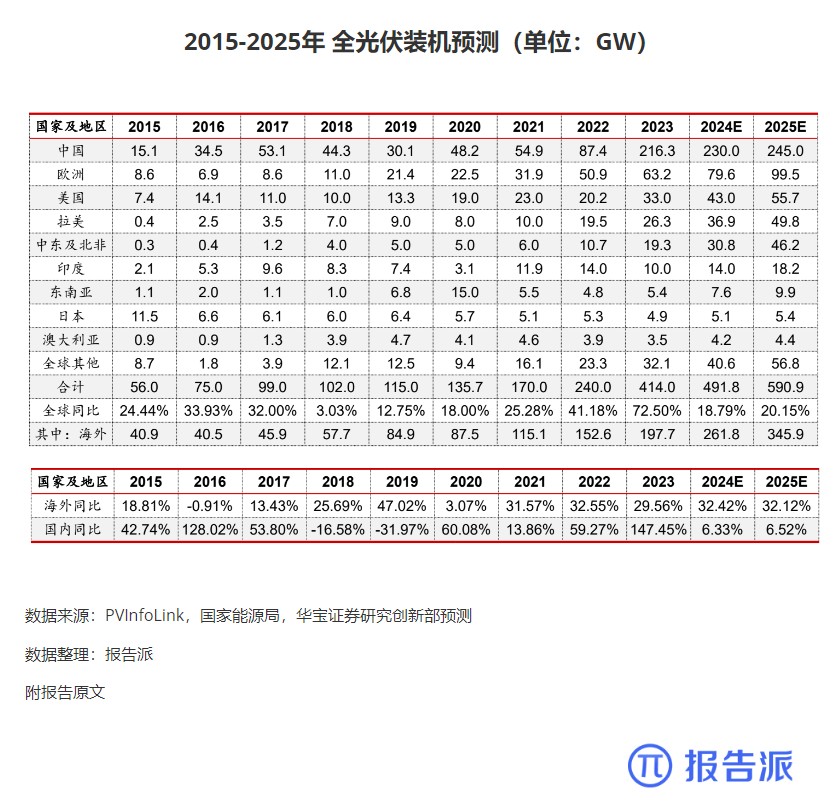
2015-2025年 全光伏装机预测(单位:GW)
市场规模
1949人已阅读
4
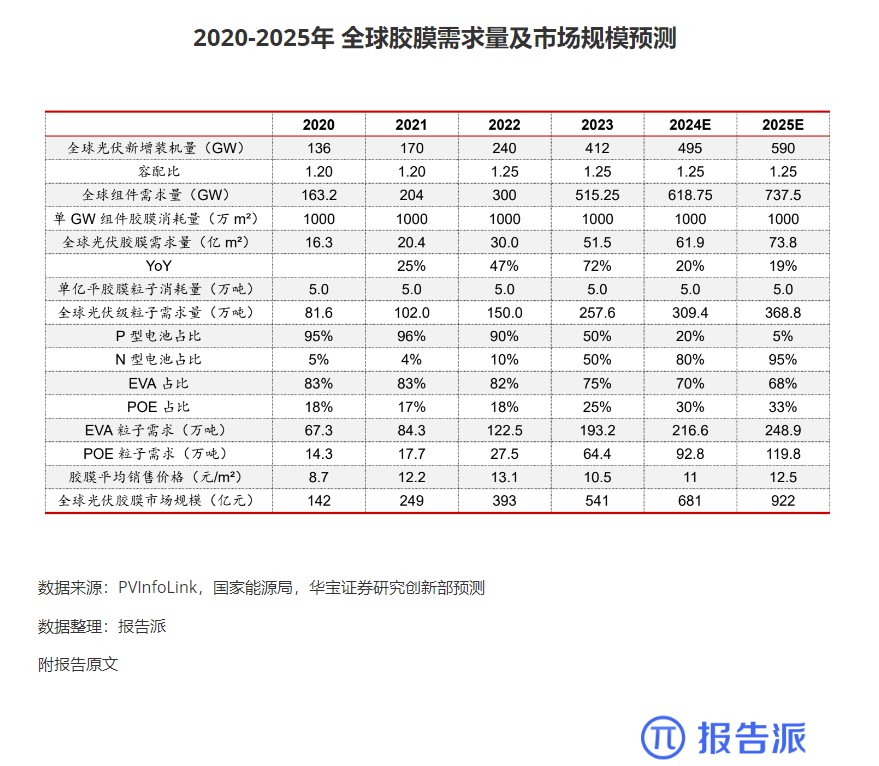
2020-2025年 全球胶膜需求量及市场规模预测
市场规模
1862人已阅读
5
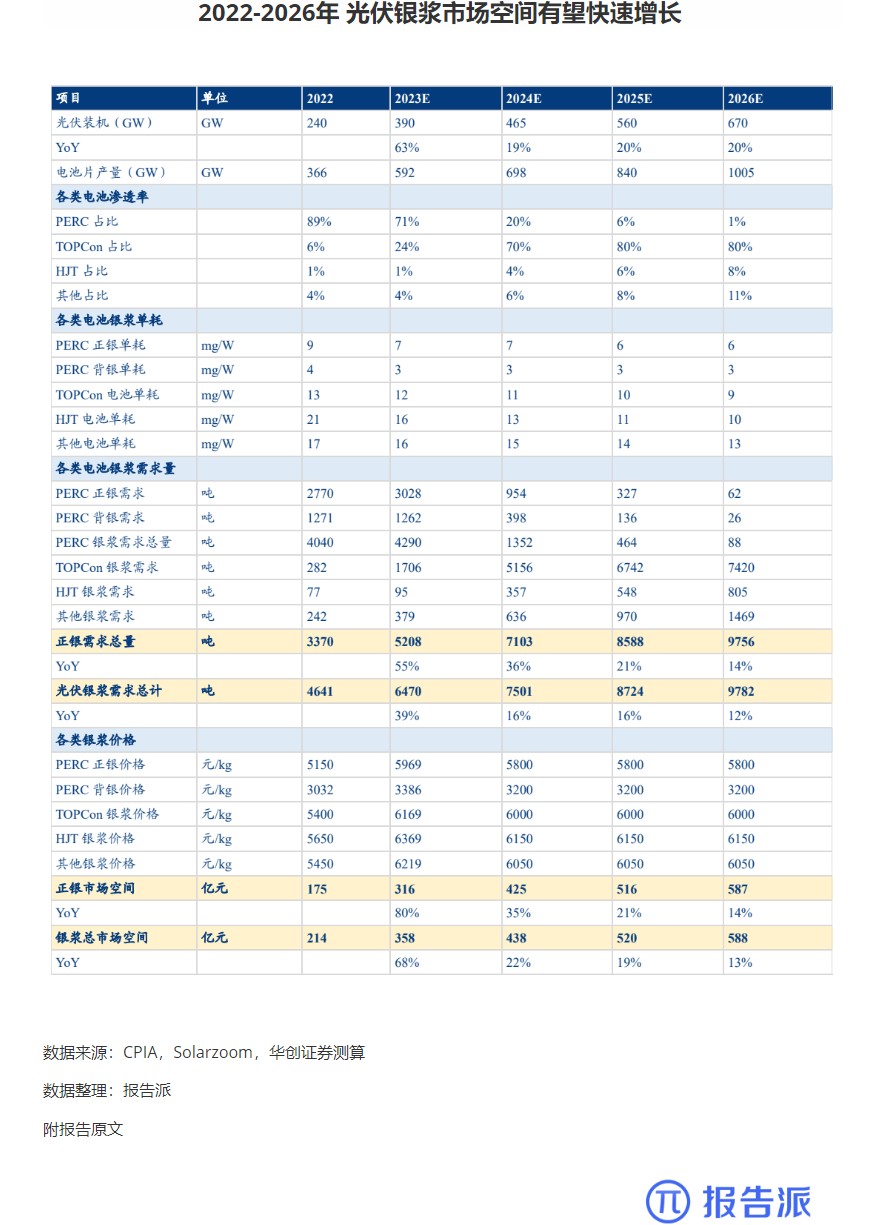
2022-2026年 光伏银浆市场空间有望快速增长
市场规模
1932人已阅读
6
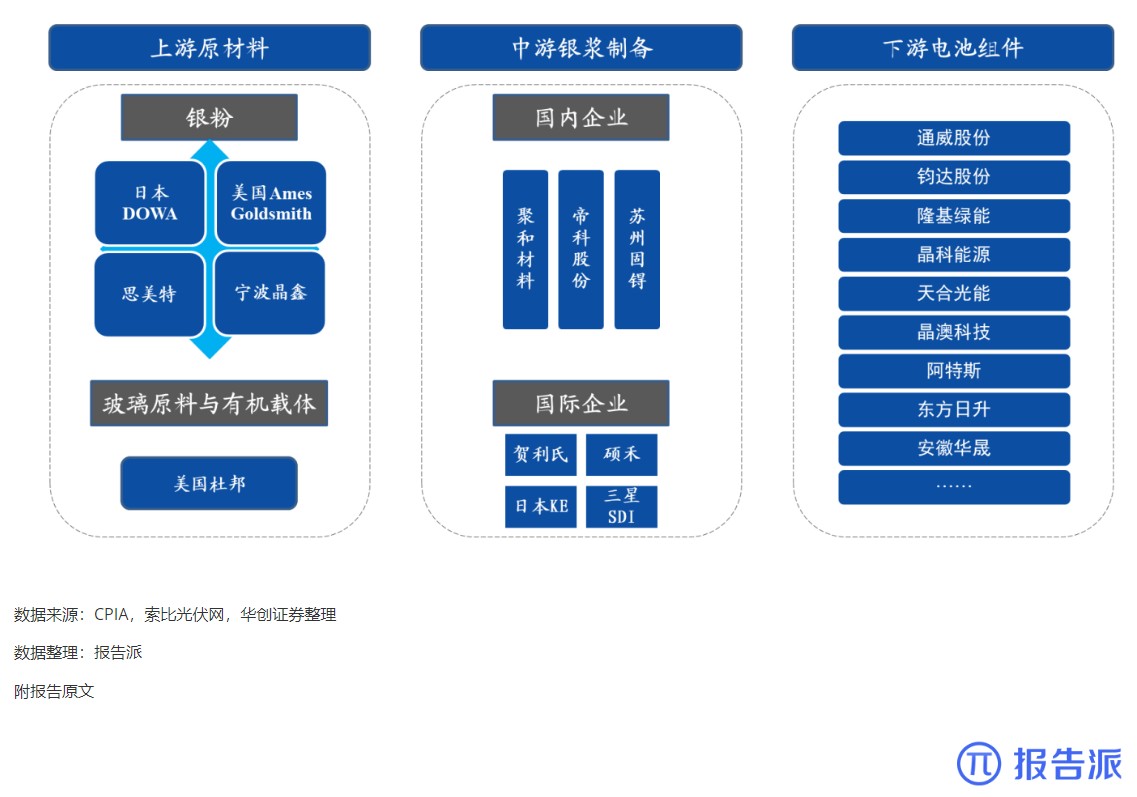
光伏银浆产业链相对简单
技术工艺
1828人已阅读
7
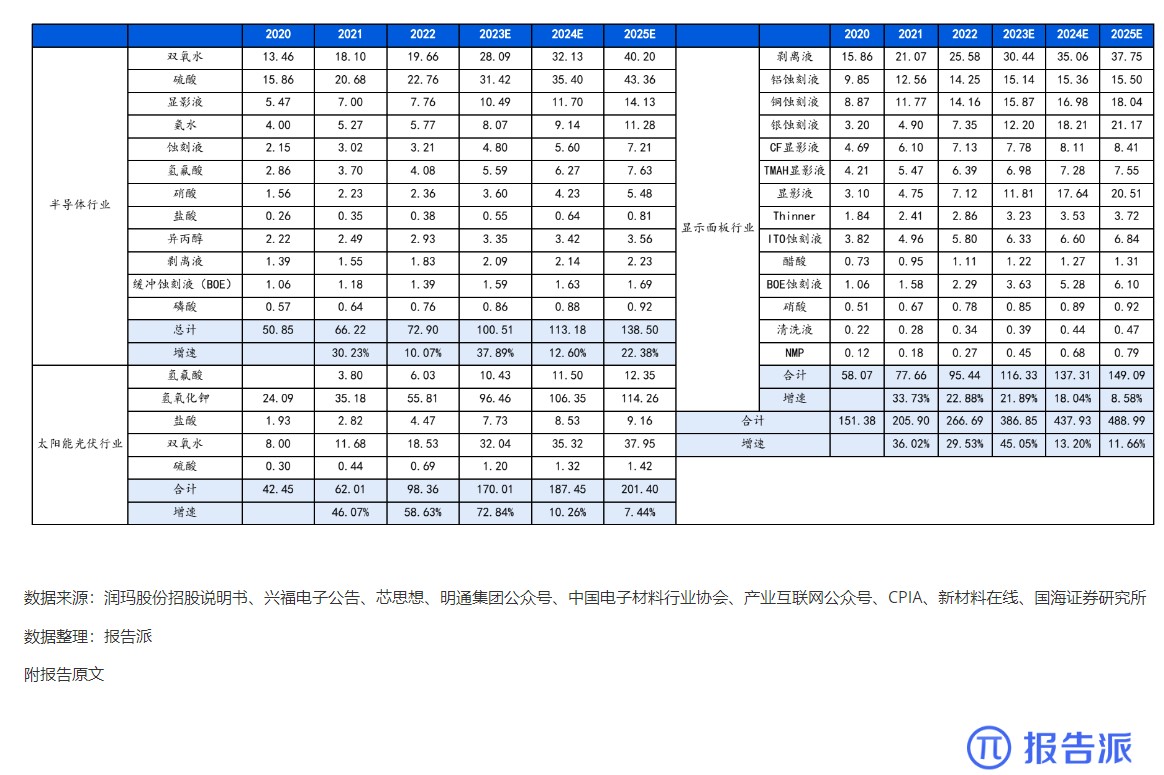
2020-2025年 我国湿电子化学品需求预测(万
市场规模
1813人已阅读
8
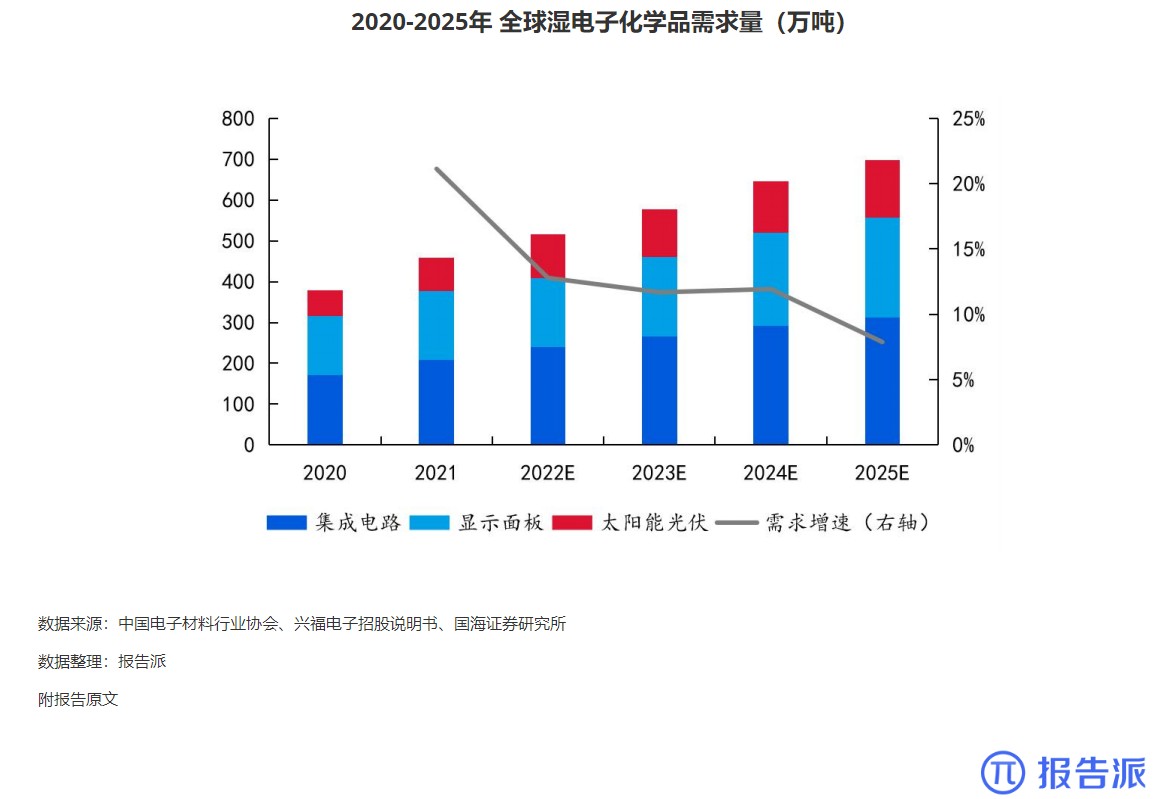
2020-2025年 全球湿电子化学品需求量(万吨
市场规模
1935人已阅读
9
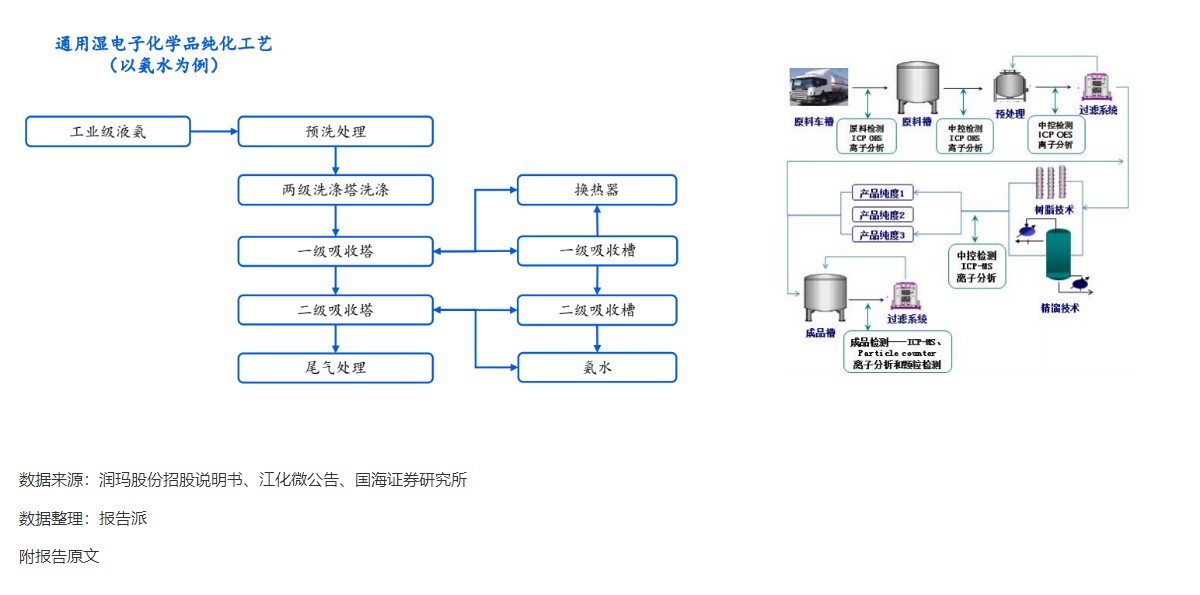
通用湿电子化学品纯化工艺
技术工艺
1674人已阅读
10
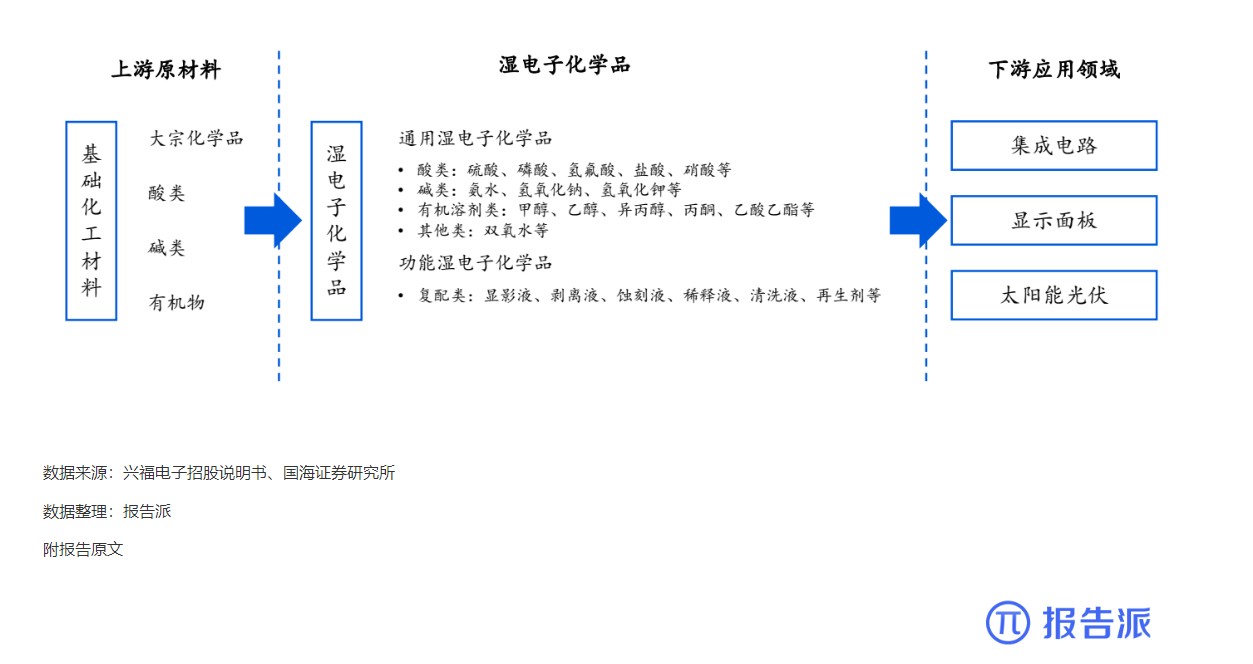
湿电子化学品上下游产业链基本情况
技术工艺
1944人已阅读
热门数据
1
2024年1—2月份规模以上工业增加值增长7.0%
2024-03-22
2
截至2023年底我国累计建成充电基础设施859.
2024-03-22
3
2024年3月21日人民币 NDF 远期合约汇兑美元
2024-03-21
4
2024年1—2月份能源生产情况
2024-03-21
5
2024年2月银行结售汇和银行代客涉外收付款
2024-03-21
6
2024年3月韩国方便面出口2.3万吨,同比增加
2024-03-21



