








2025年大算力芯片与具身智能研究报告
摘要: 在人工智能迈向通用智能(AGI)的关键节点,具身智能正被视为堪比‘计算机诞生’级别的颠覆性创新。近日发布的《大算力异构芯片赋能具身智能:从实时控制到空间计算》深度揭示了当前机器人技术演进的核心路径——以 ...
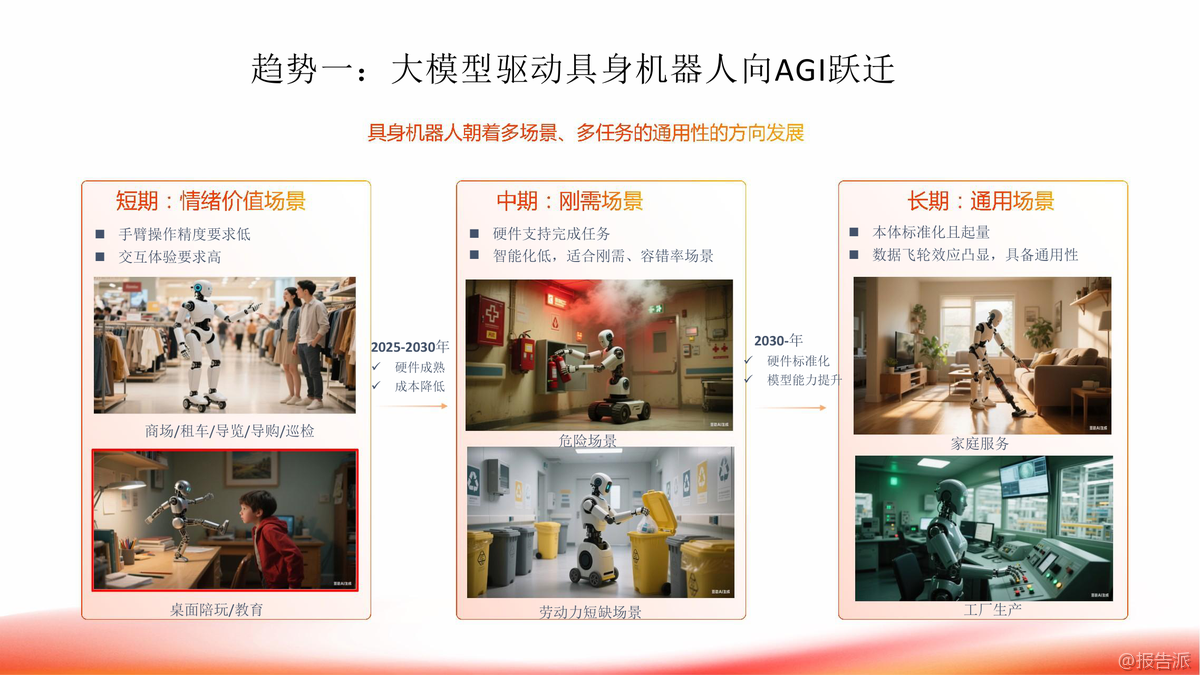
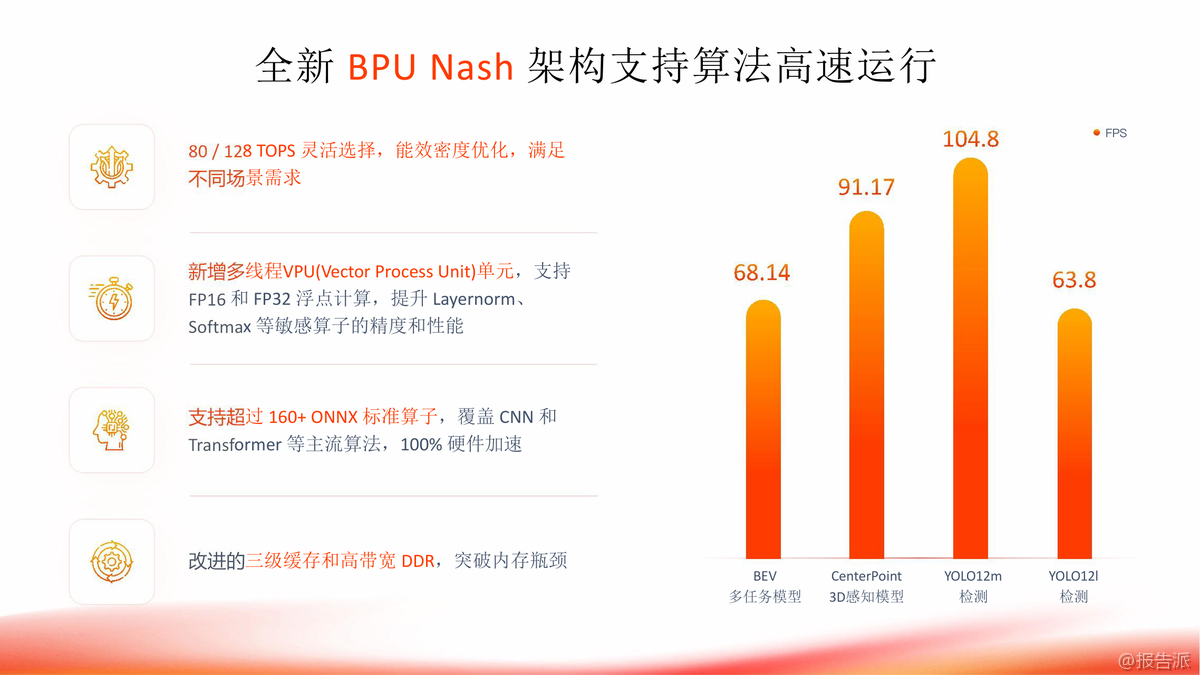
| 在人工智能迈向通用智能(AGI)的关键节点,具身智能正被视为堪比‘计算机诞生’级别的颠覆性创新。 近日发布的《大算力异构芯片赋能具身智能:从实时控制到空间计算》深度揭示了当前机器人技术演进的核心路径——以大模型驱动、Transformer架构重构和异构计算平台支撑的三位一体发展范式。 报告指出,具身机器人正经历从G1基础自动化向G5通用人工智能跃迁的五个阶段。 当前行业正处于G2向G3过渡的关键期,依托端到端操作大模型与数据飞轮效应,机器人正逐步摆脱传统规则系统的局限,实现更高自由度的动作理解和任务泛化。 这一进程的背后,是硬件标准化、模型能力提升与成本下降的共同推动,预计在2025至2030年间,商场导览、家庭服务、危险作业等场景将率先规模化落地。 值得关注的是,以Transformer为核心的基础模型正在全面重塑机器人技术栈。 视觉语言导航(VLN)、视觉语言模型(VLM)与语音识别(ASR)的深度融合,使得机器人具备更强的语义理解与环境交互能力。 与此同时,BEVFormer、PETR等基于Transformer的感知模型,正在推动3D环境建模向更高精度迈进,为复杂动态场景下的决策提供支撑。 支撑这一切的技术底座,则是专为具身智能设计的大算力异构芯片。 报告重点介绍了S100算控一体化计算平台,其采用“大脑-小脑”协同架构,集成BPU、CPU与MCU三大核心:BPU负责高算力AI推理,支持80~128TOPS算力;A78AE CPU承担任务规划与语言理解等System2“慢思考”任务;而R52+ MCU则专注实时运动控制,确保毫秒级响应。 这种异构设计实现了计算资源的最优分配,在实测中将CPU资源占用降低高达376%,显著提升系统能效与可靠性。 不仅如此,该平台还支持TSN时间敏感网络与EtherCAT实时通信,保障多传感器精确同步,并通过RDK S100开发者套件实现开箱即用。 配套的全栈工具链支持PyTorch等主流框架模型一键转换、量化与部署,大幅降低开发门槛。 目前,相关方案已在双机械臂叠衣、四足机器人步态切换、人形机器人运动控制等多个场景实现开源,覆盖多家头部具身智能企业。 未来,随着BPU架构持续迭代与多模态大模型的深化融合,具身智能将不仅局限于动作执行,更将走向真正的环境理解与自主决策。 这场由大算力芯片驱动的认知革命,或将重新定义机器与人类的协作边界,开启智能体真正融入物理世界的新纪元。 出品方:地瓜机器人 发布时间:2025年
|
推荐文章
2
2025年人形机器人产业发展报告
资讯
7人已阅读
3
2025年中国钢铁行业转型金融报告
资讯
8人已阅读
4
2025年中国社保体系改革前瞻报告
资讯
7人已阅读

5
2025年欧盟全球地位观察报告
资讯
14人已阅读

6
2025年混合云网络安全韧性白皮书
资讯
10人已阅读

7
2025年网页到应用转化路径研究报告
资讯
11人已阅读

8
2025年脱碳工业:碳捕获利用路径报告
资讯
12人已阅读
9
2025年大中华区办公物业供需趋势报告
资讯
19人已阅读
10
2025年上市公司并购价值创造报告
资讯
25人已阅读
数据图表

2
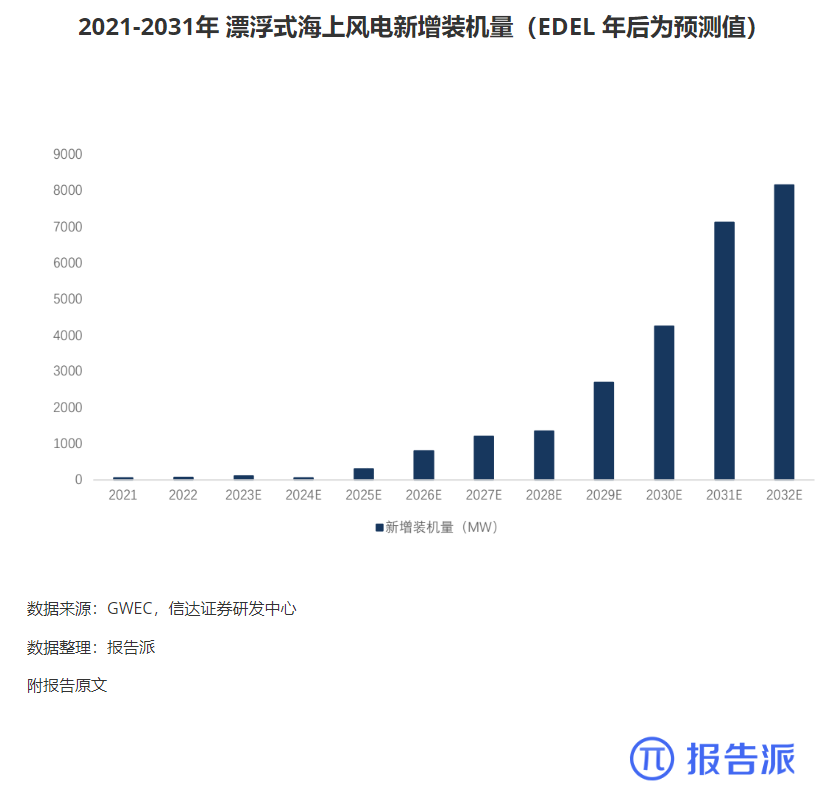
2011-2031 年全球海上风电装机量(含预测)
行业数据
1649人已阅读
3
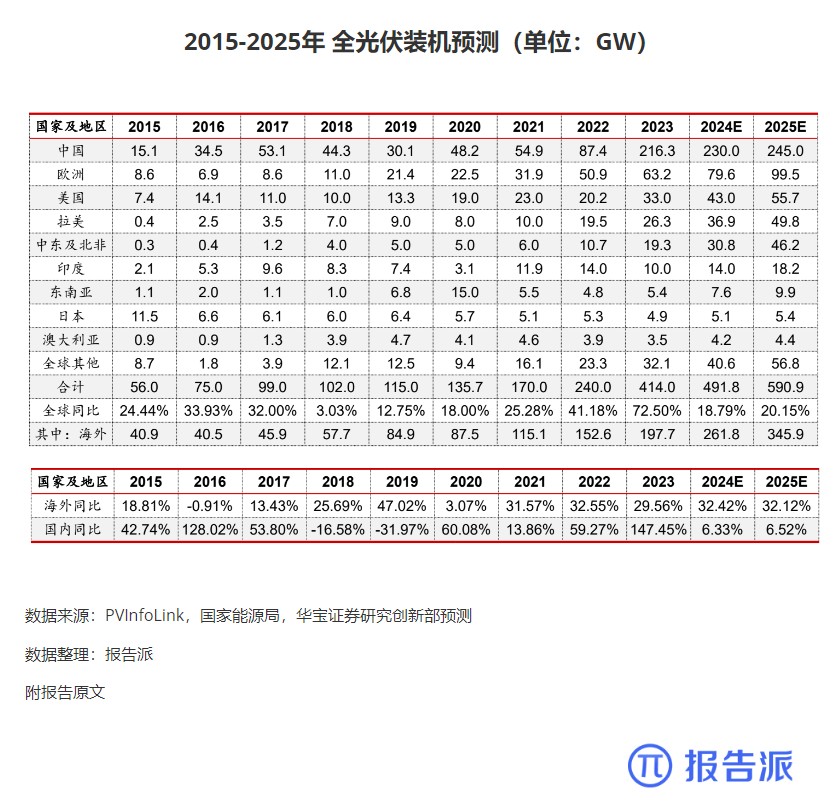
2015-2025年 全光伏装机预测(单位:GW)
市场规模
1863人已阅读
4
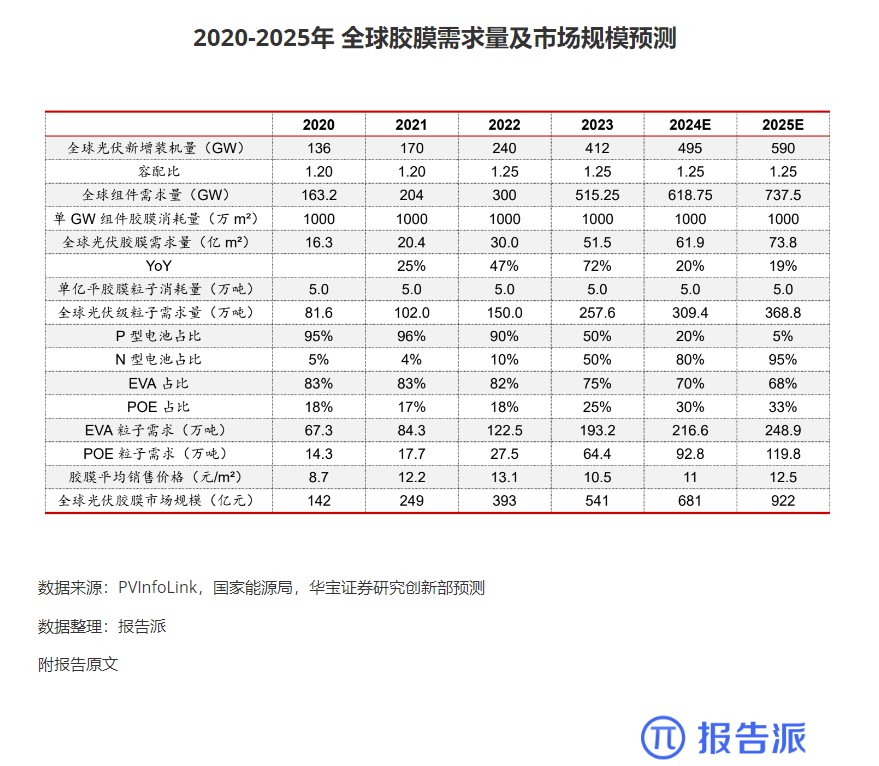
2020-2025年 全球胶膜需求量及市场规模预测
市场规模
1788人已阅读
5
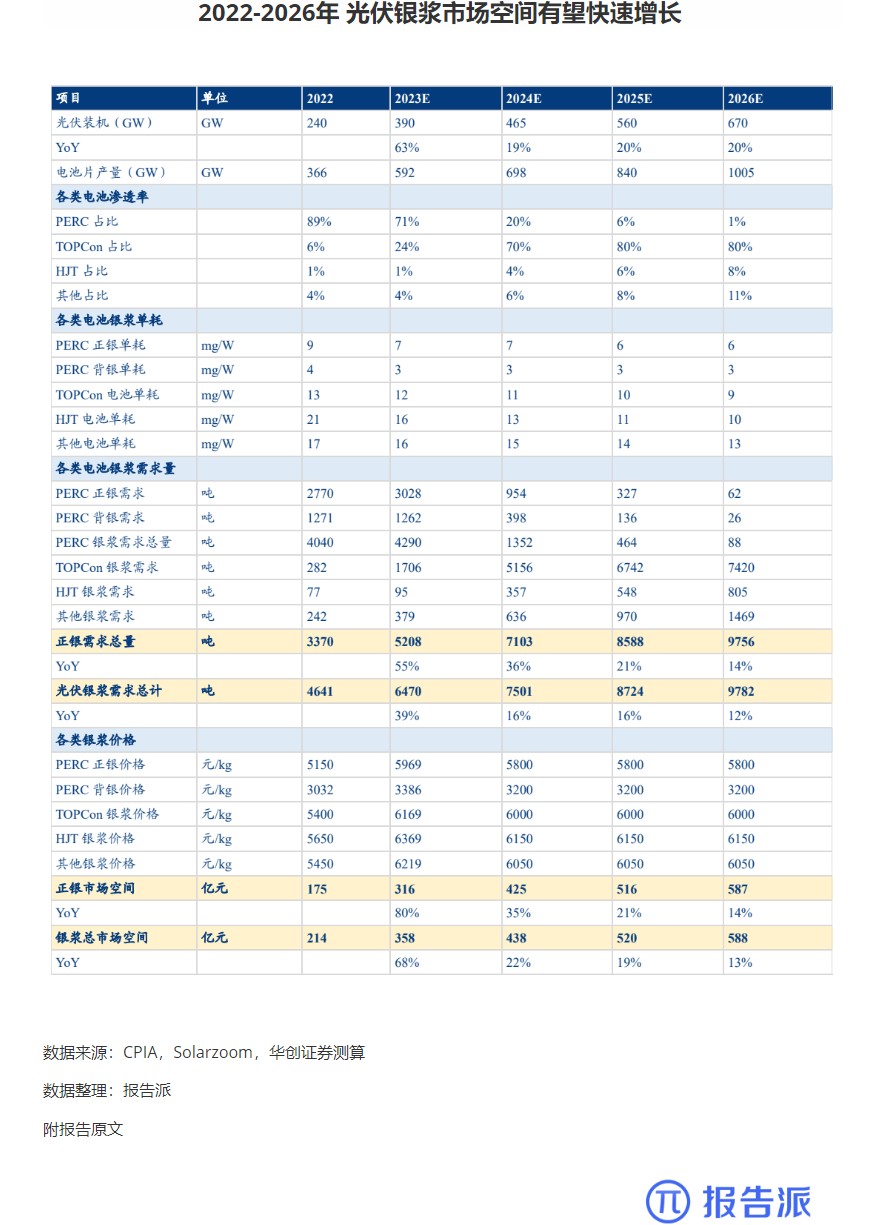
2022-2026年 光伏银浆市场空间有望快速增长
市场规模
1852人已阅读
6
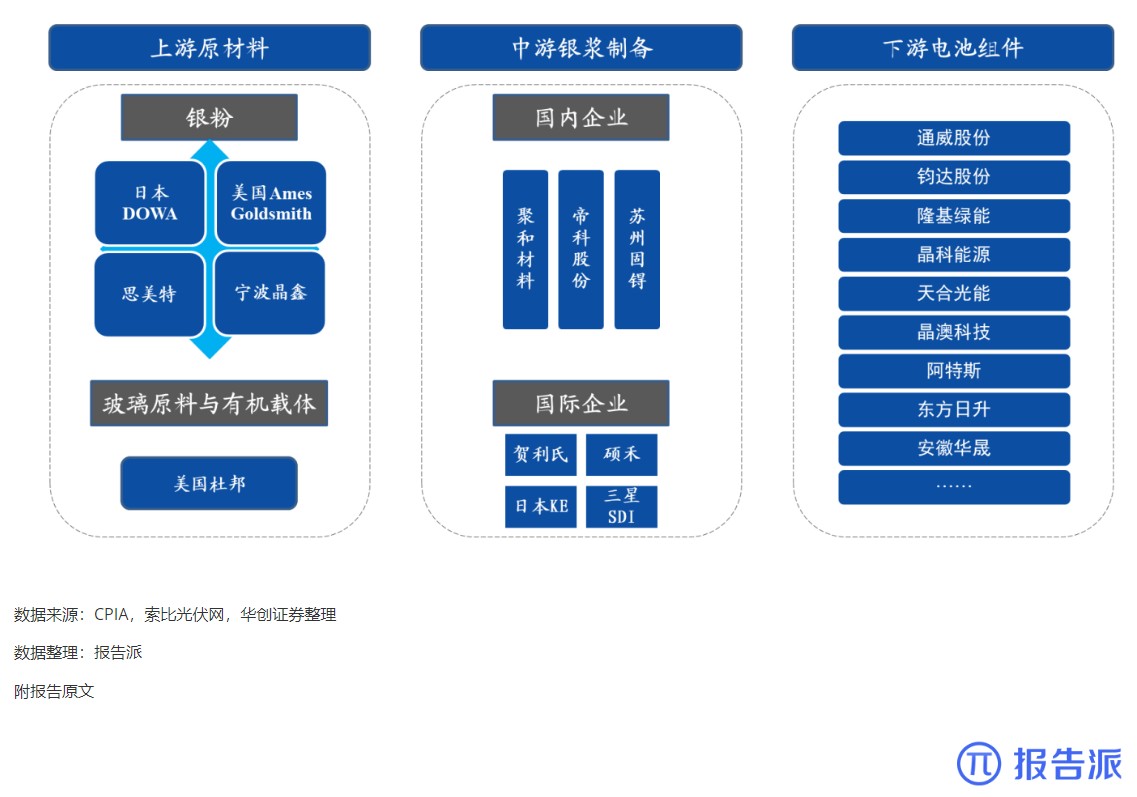
光伏银浆产业链相对简单
技术工艺
1748人已阅读
7
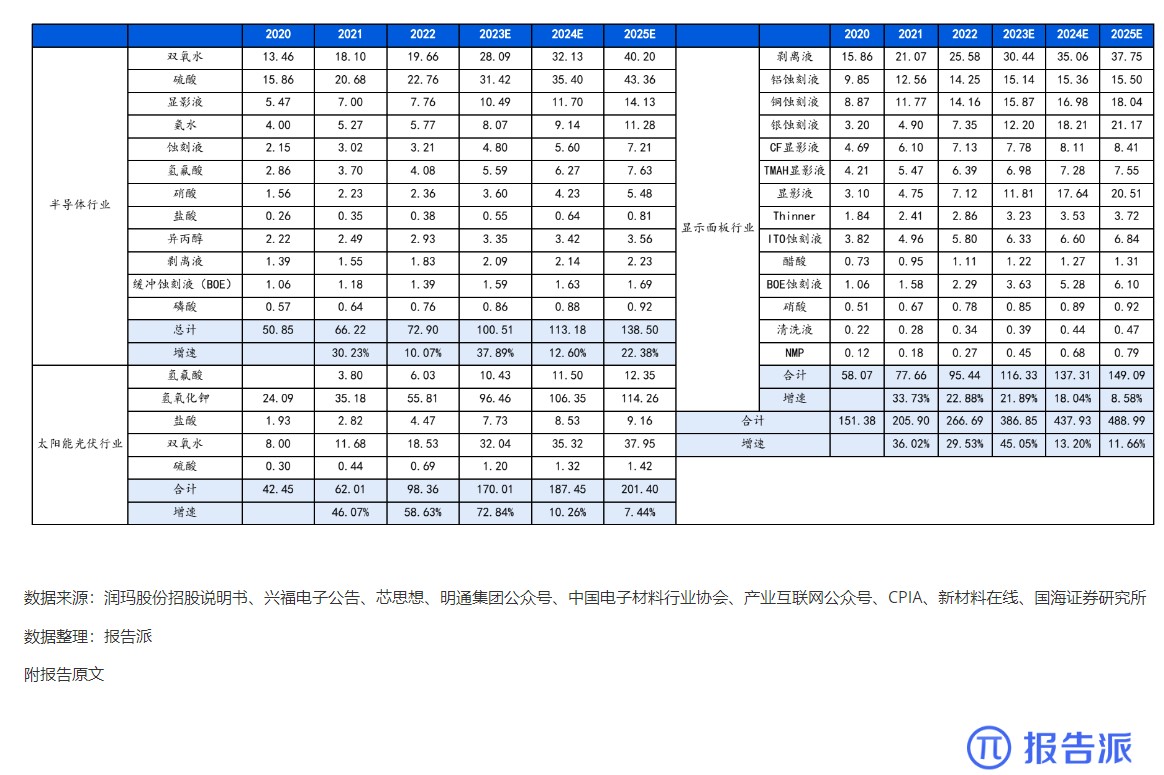
2020-2025年 我国湿电子化学品需求预测(万
市场规模
1736人已阅读
8
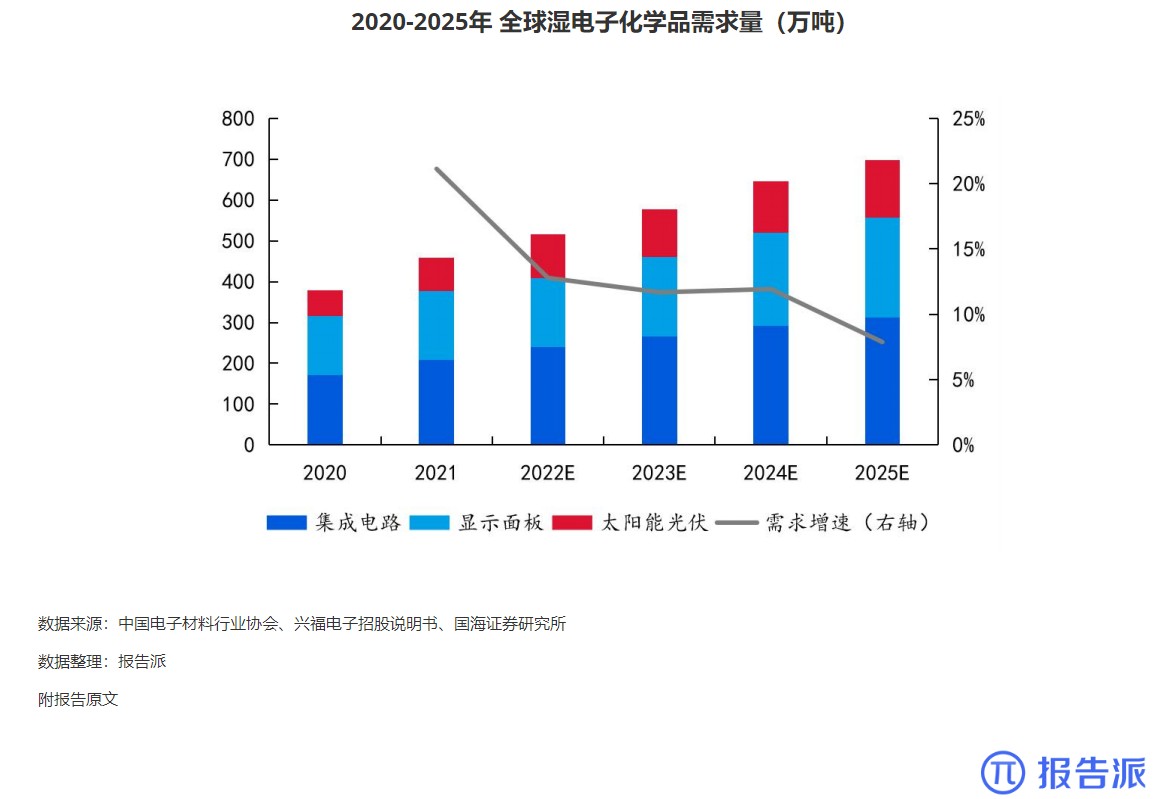
2020-2025年 全球湿电子化学品需求量(万吨
市场规模
1865人已阅读
9
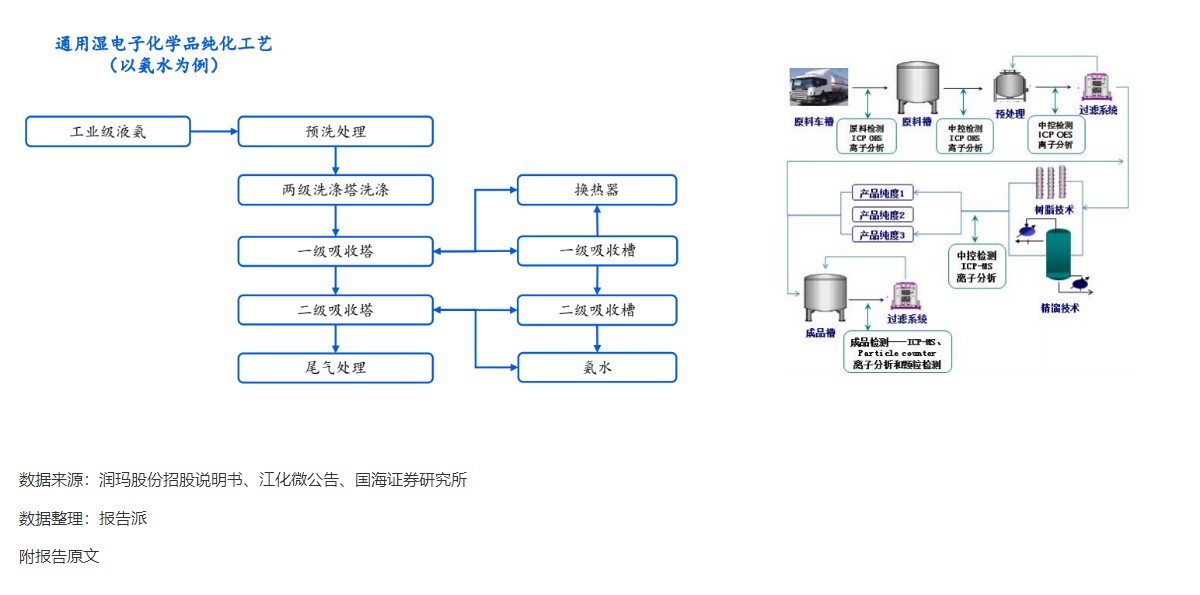
通用湿电子化学品纯化工艺
技术工艺
1604人已阅读
10
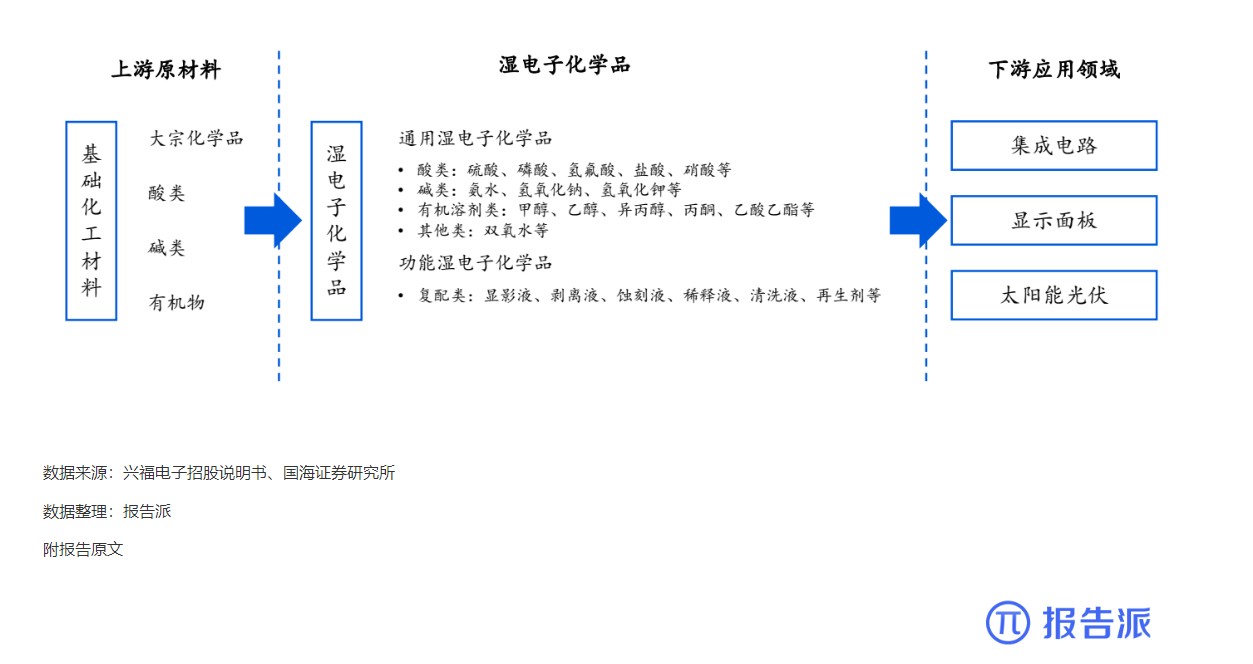
湿电子化学品上下游产业链基本情况
技术工艺
1878人已阅读
热门数据
1
2024年1—2月份规模以上工业增加值增长7.0%
2024-03-22
2
截至2023年底我国累计建成充电基础设施859.
2024-03-22
3
2024年3月21日人民币 NDF 远期合约汇兑美元
2024-03-21
4
2024年1—2月份能源生产情况
2024-03-21
5
2024年2月银行结售汇和银行代客涉外收付款
2024-03-21
6
2024年3月韩国方便面出口2.3万吨,同比增加
2024-03-21



